![]() Všechny modelové železnice vyžadují elektrickou energii. Teoreticky je sice možné postavit si nějakou zahradní železnici, na které budou jezdit pouze parní nebo dieselové mašinky a výhybky a mechanické semafory budou ovládané táhly, ale této specialitě se zde věnovat nebudeme. Také vypustíme všechny ryze mechanické hračky. Ostatní modelové (i nemodelové) vláčky jsou napájené elektřinou. Vzhledem k bezpečnosti obsluhy to bývá max. 24 V, spíše méně.
Všechny modelové železnice vyžadují elektrickou energii. Teoreticky je sice možné postavit si nějakou zahradní železnici, na které budou jezdit pouze parní nebo dieselové mašinky a výhybky a mechanické semafory budou ovládané táhly, ale této specialitě se zde věnovat nebudeme. Také vypustíme všechny ryze mechanické hračky. Ostatní modelové (i nemodelové) vláčky jsou napájené elektřinou. Vzhledem k bezpečnosti obsluhy to bývá max. 24 V, spíše méně.
Analogový systém může používat stejnosměrný nebo střídavý proud, záleží na použitých motorech. Stejnosměrných 12 V je téměř standard pro většinou výrobků. Rychlost se obvykle reguluje napětím, čím nižší, tím pomaleji jede lokomotiva. Od určitého napětí už není jízda plynulá, motor cuká, až se zastaví. K překonání mechanického odporu při rozjezd je potřebné určité minimální napětí – na něm závisí točivý moment motorku. Lokomotiva se nerozjede plynule, ale s určitým skokem na začátku. Jistým vylepšením tohoto systému může být pulzní regulátor. Velice zjednodušeně – používá se konstantní stejnosměrné napětí, které je „rozsekané“ na delší či kratší impulzy – čím jsou tyto pulzy delší a mezery mezi nimi kratší, tím rychleji lokomotiva jede. Rozjezd i brzdění je plynulé až k nule. Zpětný chod motorů se bez ohledu na typ regulace dosahuje v analogu vždy změnou polarity napětí. Pokud chceme v analogu zrychlit nebo zpomalit, udělají to všechny lokomotivy v daném napájeném úseku. Nelze tedy jednoduchým způsobem řídit odděleně jednotlivé lokomotivy. Jedinou možností zůstává rozdělení kolejiště na množství úseků a jejich samostatné napájení.
Digitální systémy vychází ze základní myšlenky, že kromě napájení je možné přenést i množství informací a příkazů pro řízení. Každá lokomotiva má svou adresu a lze ji teda doručit jedinečný příkaz (Brzdi!, Rozsviť světla!, Zahoukej! apod.) Některé systémy umožňují také zpětný přenos informací z lokomotivy do centrály. Lokomotiva, nebo jiný prvek, který má přijímat příkazy (např. i vagonek, pokud mu chceme nezávisle zapínat osvětlení, výhybka, návěstidlo), musí mít svůj dekodér. Dnes je téměř vždy realizovaný jako jednočipový mikropočítač s pár periferními součástkami. Rozměry jsou různé, ale lze je koupit i ve velikosti kolem 1 cm². Důležité je, aby systémy byly od jednoho výrobce, nebo alespoň kompatibilní. S postupem času se vyvinulo několik různých systémů. U nás i v okolitých státech je nejrozšířenější standard Digital Command Control (DCC) definovaný National Model Railroad Association (NMRA – Asociace modelových železnic). Podrobné normy lze nalézt na jejich stránkách.
Český popis si lze přečíst např. na webu Martina Pinty, v článku Libora Schmidta, nebo zde. Zjednodušeně řečeno: napájecí napětí je modulované seriovým digitálním signálem a výsledek je takový, že průběh napětí má tvar posloupnosti impulzů předepsané délky, které nesou zakódovanou informaci. Na obrázku je znázorněný průběh napětí podle uvedené normy. Toto napětí je vedené do lokomotivy, kde z něj dekodér získá příslušné příkazy a aktivuje pomocné obvody (světla, zvuk, spřáhla a pod.) a současně napájí motor napětím, které odpovídá vyslaným příkazům pro směr a rychlost. Pokud používáme digitální ovládání pro příslušenství (výhybky, semafory, osvětlení atd.) je DCC signál veden i do tzv. dekodérů příslušenství, které pak ovládájí tyto periferie.
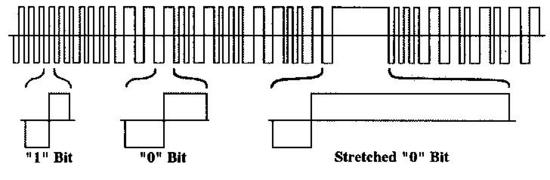
Průběh DCC signálu
Standard DCC definuje jak potřebné elektrické parametry signálu, tak i adresaci a používané příkazy. Centrály a dekodéry všech výrobců by tak měly být kompatibilní. Ale někteří výrobci si tyto normy ještě doplnili a takto poskytované služby již nemusí být zcela kompatibilní s výrobky jiných firem. Na to je potřebné dávat pozor při rozhodování o nákupu. U nás jsou snad nejvíc zastoupené výrobky Lenz nebo Roco. Pro digitální provoz tedy potřebujeme zdroj napětí, centrálu se zesilovačem (vytváří výše popsaný průběh napájecího napětí), dekodér v lokomotivě a pokud budeme digitálně ovládat i příslušenství, tak také dekodéry příslušenství. Dále něco, čím budeme provoz řídit. To něco může být ovladač podobný kalkulačce nebo mobilu, PC nebo dokonce i „chytrý“ mobilní telefon, případně i vlastnoručně vyrobený ovládací panel. Pro první seznámení snad stačí, pro další studium znovu doporučuji Martina Pintu.

 Jen bych zde rád upozornil na menší nedorozumění, se kterým se často setkáváme na českých i zahraničních webech. Je to pojem centrála (command station). Za centrálu se dost často označuje „černá skříňka“, která se připojuje mezi zdroj a koleje. U některých systémů tato skříňka obsahuje pouze usměrňovač a modulátor, který z napájecího napětí tvaruje digitální signál. V tom případě to není centrála, ale zesilovač – booster. Samotný signál DCC se však velmi často vytváří už v ovladači. Pokud za centrálu budeme považovat elektronické zařízení, ve kterém vzniká DCC signál, je to u některých sestav ovladač. Např. Roco MultiMouse – vlevo na obr.- je ovladač a v něm je integrovaná centrála, černá krabička Roco 10765 je pouze zesilovač. Naopak, v případě sestavy Lenz je LH100 – vpravo – pouze ovladač a centrála je integrovaná s boostrem LZV100 (LZV200). V případě ovládání pomocí PC vzniká v počítači signál pro seriový port (RS232 nebo RS 488) anebo USB. Přes obvod rozhraní se dále vede do centrály. V centrále (tentokrát již nestačí jednoduchá centála typu MultiMouse) se převádí na DCC signál a ten se poté také zesílí.
Jen bych zde rád upozornil na menší nedorozumění, se kterým se často setkáváme na českých i zahraničních webech. Je to pojem centrála (command station). Za centrálu se dost často označuje „černá skříňka“, která se připojuje mezi zdroj a koleje. U některých systémů tato skříňka obsahuje pouze usměrňovač a modulátor, který z napájecího napětí tvaruje digitální signál. V tom případě to není centrála, ale zesilovač – booster. Samotný signál DCC se však velmi často vytváří už v ovladači. Pokud za centrálu budeme považovat elektronické zařízení, ve kterém vzniká DCC signál, je to u některých sestav ovladač. Např. Roco MultiMouse – vlevo na obr.- je ovladač a v něm je integrovaná centrála, černá krabička Roco 10765 je pouze zesilovač. Naopak, v případě sestavy Lenz je LH100 – vpravo – pouze ovladač a centrála je integrovaná s boostrem LZV100 (LZV200). V případě ovládání pomocí PC vzniká v počítači signál pro seriový port (RS232 nebo RS 488) anebo USB. Přes obvod rozhraní se dále vede do centrály. V centrále (tentokrát již nestačí jednoduchá centála typu MultiMouse) se převádí na DCC signál a ten se poté také zesílí.
Pro pochopení uvádím obrázek převzatý od Paco Cañada z http://usuaris.tinet.cat/fmco/dcc_en.html. Command Station je centrála (zde integrovaná s ovladačem), Booster je zesilovač, Power Suply napáječ. Mobile Decoder je lokomotivní dekodér, Accessory Decoder je dekodér příslušenství. Layout – kolejiště, Feedback – obvody zpětné vazby.
Na české Wikipedii lze také najít několik článků, zabývajících se modelovou železnicí, které případným zájemcům pomohou vysvětlit některé pojmy. Zejména doporučuji heslo Modelová železnice, případně pokračovat na další odkazy z této stránky. Samozřejmě, daleko víc informací je na anglické verzi Wikipedie. Z Wikipedie jsem převzal obrázek, který velmi hezky ilustruje možnosti digitálního řízení železnice. Uveřejněný je v samostatném příspěvku.
Doplněno 15. května 2014
Pingback: Honzíkovy vláčky » Blog Archive » Ovladač PWM pro malé (nejen „zetkové“) kolejiště