
Ilustrační foto: Peter L. Svendsen
V článku o bezdrátovém interfejsu GenLI-Bluetooth, který vyvinul Vít Vaculík, jsem zmínil další jeho výrobek, kterým je dekodér pro přejezdové zabezpečovací zařízení (dále jen „PZZ“). Spolu s Honzou Hlaváčkem jsme sestavili podle původního návrhu autora tři prototypy zařízení, které Honza vyzkoušel k velké spokojenosti na svém kolejišti. Následně jsem měl možnost sledovat závěrečnou část vývoje, do které jsem v dobré víře přispěl několika menšími návrhy na úpravy. Autor zařízení dokončil a jeho finální verze je popsána ZDE.
Co modul PZZ umí?
Možná, že někteří čtenáři znají, nebo možná i vlastní jiný modul pro ovládání přejezdů, a to z dílny V. Báni – PR-3B. Je to modul umožňující automatické spouštění výstražníků železničního přejezdu a závor. Má věrně vyvedenou zvukovou signalizaci. Sám jeden takovýto modul mám. Pro analogové kolejiště je to ideální řešení, pro digitální kolejiště však ještě potřebuje doplnit spínacím dekodérem, aby ho mohl řídit signál DCC. Zásadní nevýhodou je dnes jeho špatná dostupnost. Firma MTB se v současnosti primárně věnuje vývoji a produkci lokomotiv a elektronika šla stranou. Zásluhou J. Němečka se sice podařilo zajistit občasnou dodatečnou výrobu, ale ne každý má čas čekat několik měsíců, navíc s nejistou prognózou dodání výrobku. Existují i další výrobci obdobných zařízení, ale nepovažuji za nezbytné je zde zmiňovat, a už vůbec ne porovnávat jejich výrobky s modulem PZZ Víti Vaculíka, protože to snad ani nejde.
Vaculík totiž k problému přistoupil z opačné strany. Dekodér přejezdu navrhoval primárně pro DCC s tím, že jeho aplikace na analogovém kolejišti bude možná.
Napájení je řešené jako samostatné; může to být stejnosměrné nebo střídavé napětí v rozsahu od 9V výše. Maximální velikost je omezená povoleným vstupním napětím stabilizátoru 7805 (podle výrobce), nebo povoleným napětím cívky elektromagnetu závor. Autor však nedoporučuje tuto hodnotu nepřiměřeně zvyšovat kvůli výkonové ztrátě na stabilizátoru. Používat zdroj jako topení pod kolejištěm není optimální. V dekodéru se interně používá 5V pro napájení elektroniky a LED výstražníků, případně serva. Elektromagnety se napájí nestabilizovaným vstupním napětím.
Dalšími vstupními svorkami je napětí (signál) DCC (J, K). Používá se pouze jako vstup, dekodér nemá zakomponovanou možnost čtení a vyslání uložených hodnot CV, nebo aktuálního stavu přejezdu. Ale vzhledem k účelu a použití, jakož i malému počtu proměnných CV, to lze akceptovat. Po počátečním nastavení na kolejišti stejně tyto parametry nikdo neřeší.
Dekodér lze také ovládat dvěma externími tlačítky (nebo logickou hodnotou L na příslušném vstupu), což umožní jeho použití i na analogových nebo hybridních kolejištích. A také je možné připojení jednoduchého pomocného obvodu umožňujícího automatické řízení přejezdu jízdou vlaku (opět vhodné zejména pro analog).
Výstražníky
Výstupů má obvod několik – především jsou to výstupy pro pár výstražníků se dvěma červenými, anebo dvěma červenými a jedním bílým světlem. Dá se volit rychlost (frekvence) přepínání světel, doba prolínání (imitace dosvitu a rozsvěcení žárovky), zapnutí nebo vypnutí tzv. pozitivy (bílé světlo blikající 33 x za minutu na novějších výstražnících). Nastavit lze i prodleva pro automatické zapnutí pozitivy.
Jako zdroje světla v přejezdových výstražnících jsou doporučované LED, resp. LED SMD, ale výstup obvodu je osazen dostatečně výkonnými tranzistory a ochrannými diodami, takže lze použít i žárovky (např. pro zahradní železnici).
Dalším výstupem je zvuk – autor doporučuje reproduktor o průměru cca 50 mm do 1W s impedancí 8Ω. Hlasitost lze regulovat, ale intenzita zvuku by pro zahradní železnice nestačila. Pochybuji však, že někoho by na domácím modelovém kolejišti bavilo, kdyby zvonky na přejezdu bylo slyšet až k sousedům. V konfiguraci lze navolit jeden z pěti možných zvuků používaných na tratích ČSD/ČD/SŽDC. Všech pět zvuků je uloženo v jedné samostatné EEPROM, kterou lze navíc měnit.
Při komerčním řešení se nabízí i možnost požádat autora o nahrání vlastních zvuků, pokud by někdo někde „ulovil“ nějaký exotický zvuk a bude trvat na jeho nahrání do modulu.
Závory
Velmi důležitou součástí přejezdu jsou závory. Pro jejich ovládání existují prakticky tři základní možnosti – pomocí elektromagnetů, motorického pohonu nebo servo-pohonů. Samozřejmě, v úvahu přichází i další varianty jako paměťový drát, speciální motorky atd.
Modul proto obsahuje dva výstupy pro elektromagnety nebo motorický pohon označené ELMAG Z (eZ) a (ELMAG Z)‘ (eZ)‘ (tedy „stavově invertovaný ELMAG Z (eZ), apostrof zde představuje označení opačné funkce). Jedním je možné závory s elektromagnetickým ovládáním spouštět, druhým zvedat. V konfiguraci lze zvolit, jestli tyto výstupy budou trvalé, nebo impulsní, a samozřejmě lze definovat i délku impulsů. Tyto výstupy lze také použít pro závory ovládané elektromotory nebo paměťovým drátem. Napětí tohoto výstupu je dané vnějším zdrojem celého zařízení a úmyslně není stabilizované. V případě potřeby nižšího napětí (paměťový drát) není problém napájet výstup stabilizovanými 5V.
Dalším výstupem je výstup pro servo. Právě obvod pro ovládání serva považuji za velmi zdařilý a kromě DCC ovládání prakticky za největší přínos autora v řešení celého dekodéru. Pro pohon závor se může použít jak servo analogové, tak i digitální. Železniční modeláři, na rozdíl od leteckých, používají obvykle serva jednoduchá a levná (snad proto, že jich potřebují dost velký počet). Velkou nectností těchto analogových serv je „zaškubání“ (zejm. při zapnutí), případně jejich nepravidelný chod. Je to způsobeno levnou elektronikou v servu. Nejčastěji je příčinou nabíjení kondenzátoru po připojení napájení. Levná analogová serva jsou rovněž citlivá na různé rušivé signály, které se kolem kolejiště vyskytují. Eliminuje se to různě – mechanickou vůlí v převodech, opožděným zapínáním apod. Jak známo, na odborných diskuzích modelářů už tomuto „nešvaru“ bylo věnováno hodně názorů a úvah.
Vít Vaculík navrhl, vyzkoušel a do zdárného konce dotáhl celkem zajímavý způsob, jak tomuto jevu u serva předejít. Nejprve jsem tomu nechtěl věřit, ale když jsem to uviděl v reálu, a zejména, když mi jeho autor princip popsal, musel jsem konstatovat, že u jeho dekodéru servo po připojení napájecího napětí opravdu „ani nemukne“ (a samozřejmě, také ani necukne). Proč, zatím publikovat nebudu, to nechám na pozdější dobu a autora myšlenky. Zatím chce ještě pokračovat ve zdokonalování řešení.
Samozřejmě, servo má několik parametrů, které se zapisují do proměnných CV a nastavuje se jimi velikost výchylky, rychlost chodu, počáteční poloha atd. Ještě zmíním, že jak počáteční adresa dekodéru, tak i parametry výchylky serva lze nastavovat jednoduše ručně pomocí jediného ovládacího tlačítka a jumperu. Podrobnější informace jsou v popisu dekodéru.
Zhodnocení
Dekodér PZZ je univerzální digitální dekodér určený pro přejezdy na modelových kolejištích bez ohledu na měřítka. Primárně je určen pro DCC kolejiště, ale stejně spolehlivě může být použit na analogovém kolejišti. Ovládání je intuitivní a jednoduché. Prostě, je to něco, co na našem modelářském trhu chybělo, tudíž velmi vhodně vyplňuje tuto mezeru. Za velký přínos (použitelný i jinde) považuji eliminaci úvodního zákmitu serva.
Za mne má ∗ ∗ ∗ ∗ ∗ .
Na závěr fotografie dekodéru PZZ v mé drobné úpravě: vynechaný stabilizátor – nahrazený filtrem (5V používám z vnějšího zdroje), nejsou osazené tranzistory a svorkovnice pro elektromagnety (používám pouze servo) a spínací tranzistory pro LED nahrazeny méně výkonnými typy (BC337). Na desce je doplněná modrá LED indikující přítomnost napájecího napětí 5V. Vzadu je vidět kousek „servozávory“ používané na zkoušení a nastavení dekodéru.
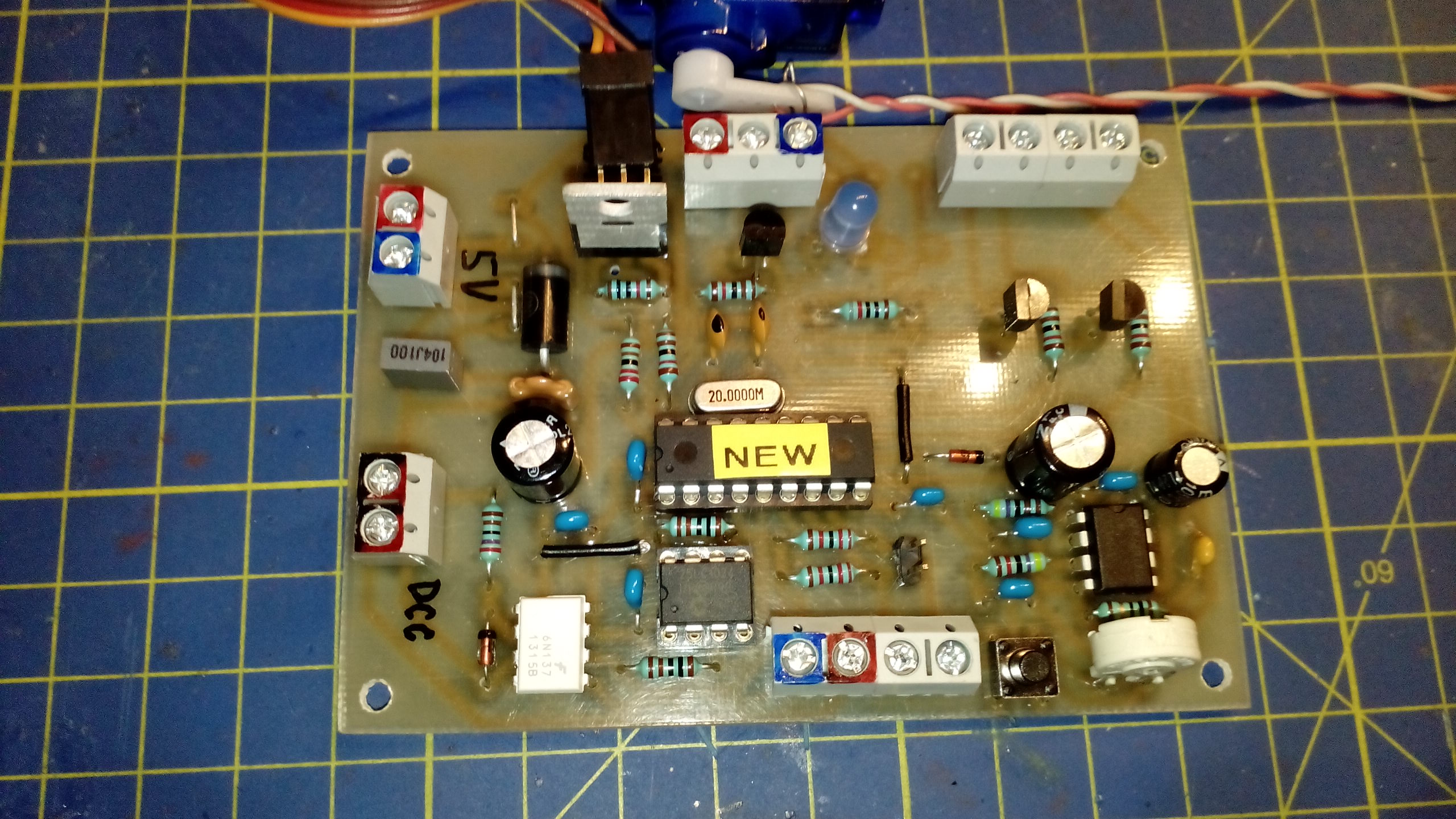
Dekodér PZZ v mé úpravě
Dobrý den, hledám kontakt na někoho kdo mi může poskytnou naprogramovane pic pro tenhle přejezdovy dekoder. Díky za odpověď.
Odpověď emailem.